Un equipo del centro de investigación CEIT-IK4 con sede en San Sebastián y asociado a la Universidad de Navarra ha desarrollado un robot que ayuda al cirujano a realizar una operación de columna vertebral, denominada fijación transpedicular, que hasta ahora se realizaba de forma manual. El prototipo ya está finalizado y en septiembre se empezará a probar con cerdos.
Investigadores del centro CEIT-IK4 han finalizado el desarrollo de un sistema robótico que tiene como misión ayudar a los cirujanos en operaciones de fijación transpedicular, utilizadas para inmovilizar vértebras dañadas o rotas para que no afecten a las estructuras circundantes.
La intervención, que se realiza habitualmente de forma manual, consiste en la inserción de tornillos a través de los pedículos vertebrales y la posterior unión de estos mediante barras metálicas para formar una estructura de soporte.
El prototipo de robot ayudante ha tardado cerca de cinco años en desarrollarse en el marco de un proyecto denominado ELCANO, que en 2012 logró financiación del programa Innpacto del Ministerio de Economía y Competitividad.
Según explica a Sinc Emilio Sánchez, investigador de mecánica aplicada del centro donostiarra y director científico del proyecto, el sistema consta de tres módulos. “El primero es el software de planificación, que ofrece al cirujano la posibilidad de organizar la operación con todo detalle a partir de las radiografías del paciente y decidir el tamaño de los tornillos y dónde deben ir insertados. Esta información se envía en tiempo real al quirófano para que el cirujano tenga una guía sobre la mejor forma de intervenir”.
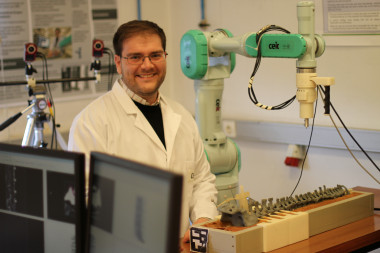
Otro de los módulos es brazo robótico que asiste al cirujano en la operación y el tercero es un sistema de navegación y de guiado por imagen. Con todos estos componentes, el médico podrá ordenar al robot que se situé en la vértebra en la que se quiere intervenir y se alinee para realizar operación, añade.
El asistente robótico está basado en el sistema cooperativo de control compartido, también llamado COBOT o colaborativo. En estos sistemas el usuario sujeta el extremo final del robot y ejecuta la tarea en cooperación con este, “de esta manera se combinan la destreza y la precisión del robot con la experiencia y el juicio del usuario”, dice Sánchez.
La fijación transpedicular consiste en la inserción de tornillos y la posterior unión de estos mediante barras metálicas
Procedimiento menos invasivo
En su opinión, “una de las ventajas de utilizar este tipo de procedimiento es que es más seguro, ya que su ejecución es menos invasiva y por tanto se reduce el riesgo de infección, la pérdida de sangre y las cicatrices”.
El investigador señala que el prototipo ya está listo y que se empezará a probar con cerdos en septiembre en la Clínica Universitaria de Navarra.
En el proyecto, además de Sánchez, ha participado Diego Borro, que ha sido el responsable de crear el software de planificación, y Martín Alfonso Landeria, que ha basado su tesis en el desarrollo del robot y que “ha sido el que más duro ha trabajado de todos”, según el director científico. Todos ellos pertenecen al departamento de Mecánica Aplicada de CEIT-IK4.
“Tenemos financiación para un año y medio más, pero luego no sabemos qué va a pasar, por eso ya vamos a empezar a buscar inversión de fondos de capital riesgo”, dice.
Como socio empresarial en esta iniciativa Innpacto, CEIT-IK4 ha contado con la colaboración del consorcio vasco Egile Corporation XXI. “Si todo va bien y conseguimos financiación, esta firma podría ser la encargada de fabricar el robot”, concluye el responsable.
Fuente: http://www.agenciasinc.es/Noticias/Investigadores-vascos-desarrollan-un-robot-para-operaciones-de-columna-vertebral
No hay comentarios :
Publicar un comentario